私たちの列車運行システムでは、分岐器の切り替えを完全に自動化しています。
PCから無線で各分岐器へコマンドを送信し、列車が指定のルートを正確に通るよう制御しています。
今回は、この「分岐器自動制御システム」の仕組みについて、詳しく紹介させていただきます。
1. 分岐器のハードウェア構成

こちらが、私たちが独自に制作している分岐器です。3Dプリンタを活用し、「白いレールの土台」と「灰色の切り替えパーツ」を別々に印刷して組み立てています。
外観は通常のプラレールと同様ですが、この分岐器の最大の特徴は「裏側」にあります。
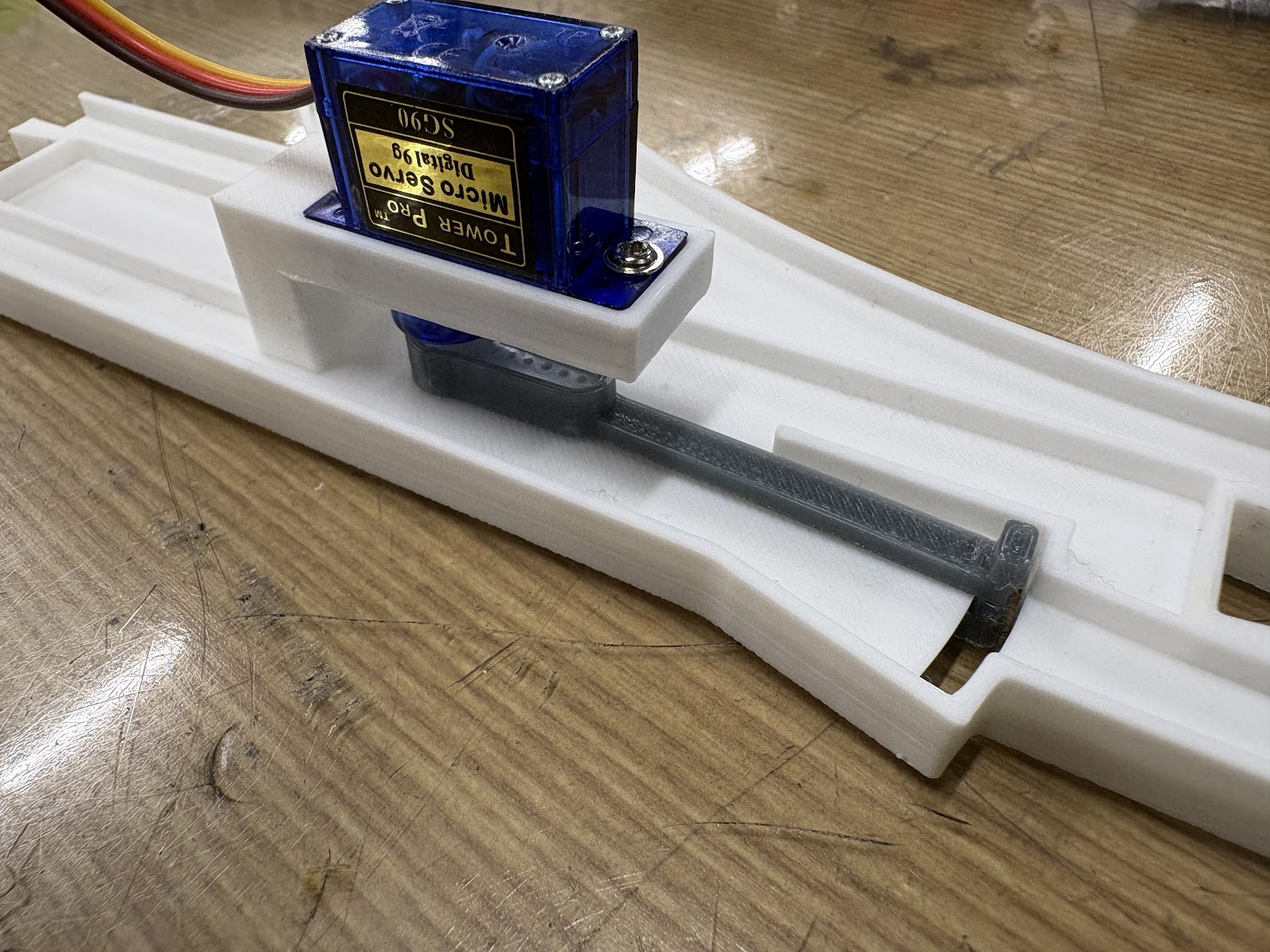
切り替え機構には、小型のサーボモータ「SG90」を採用しました。モーターの回転角を直接制御することで、ポイントの角度を切り替えています。
モーターをレールの真下に設置する構造上、この分岐器は「橋脚の上」に設置することを前提としています。設置に少し工夫が必要であるという難点はありますが、スムーズで確実な切り替え動作を実現するためにこの方式をとっています。
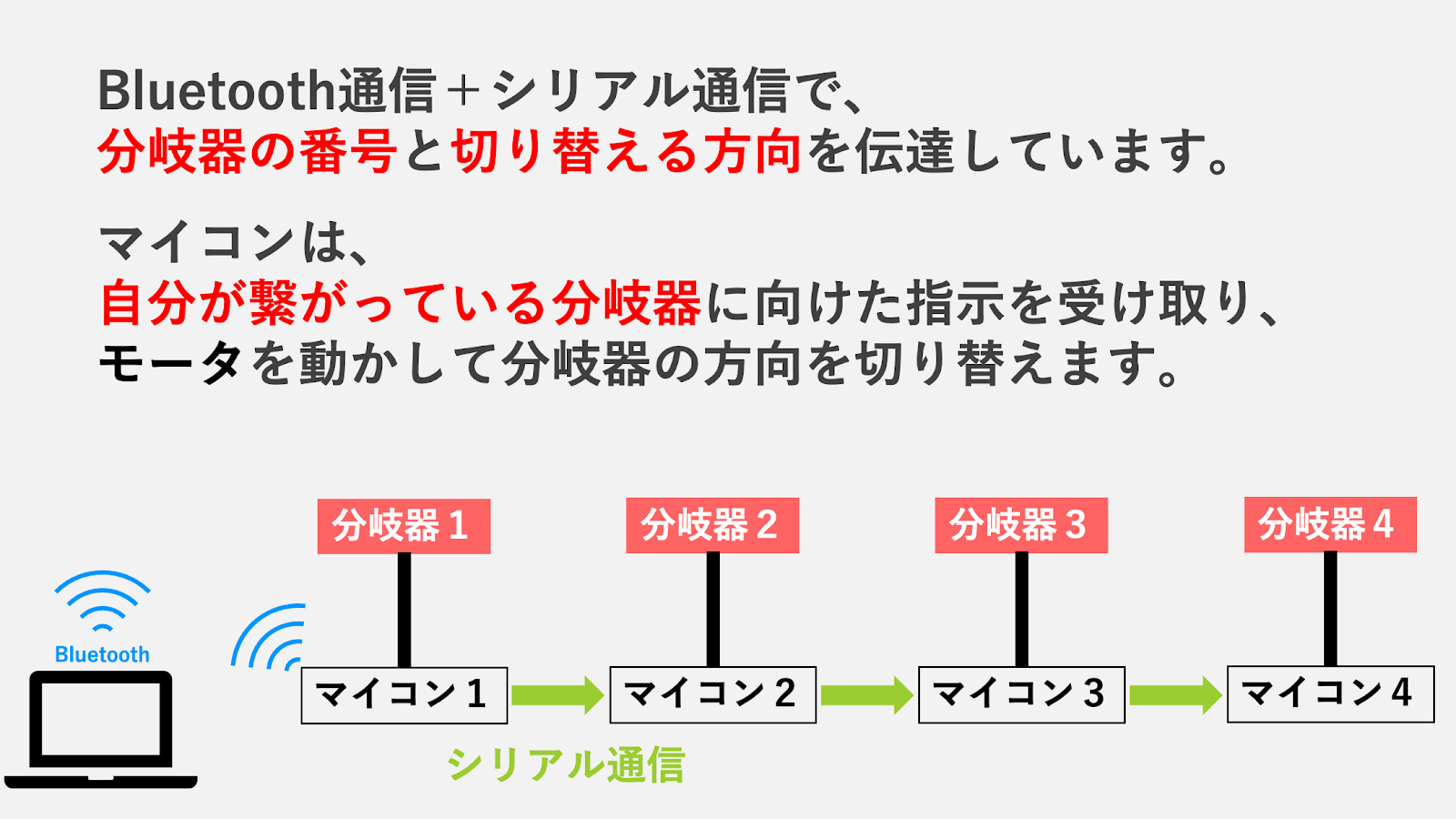
各分岐器のモーターは、マイコン(ESP32)を搭載したブレッドボードに接続されています。PCからの指示をこのマイコンが受け取り、サーボモータへ角度を指令します。
通信にはBluetooth(無線)とシリアル通信(有線)を組み合わせています。
PCと無線通信するマイコンを「親機」として一台に絞り、各マイコン間を有線で繋ぐことで、通信の安定化とPCの負荷軽減を図っています。
PCからは、例えば「P21」といった簡潔な文字列を送ります。
- P2:分岐器の番号(ID)
- 1:方向指示(0=直進 / 1=カーブ)
「P21」は「2番の分岐器をカーブ方向に切り替える」という指示です。このような情報伝達により、遠隔操作を実現しています。
2. ソフトウェアによる自動制御ロジック
ここからは、PC側ではどのように列車を判断して分岐器を動かしているのかを説明します。
列車の判定と進路切り替え
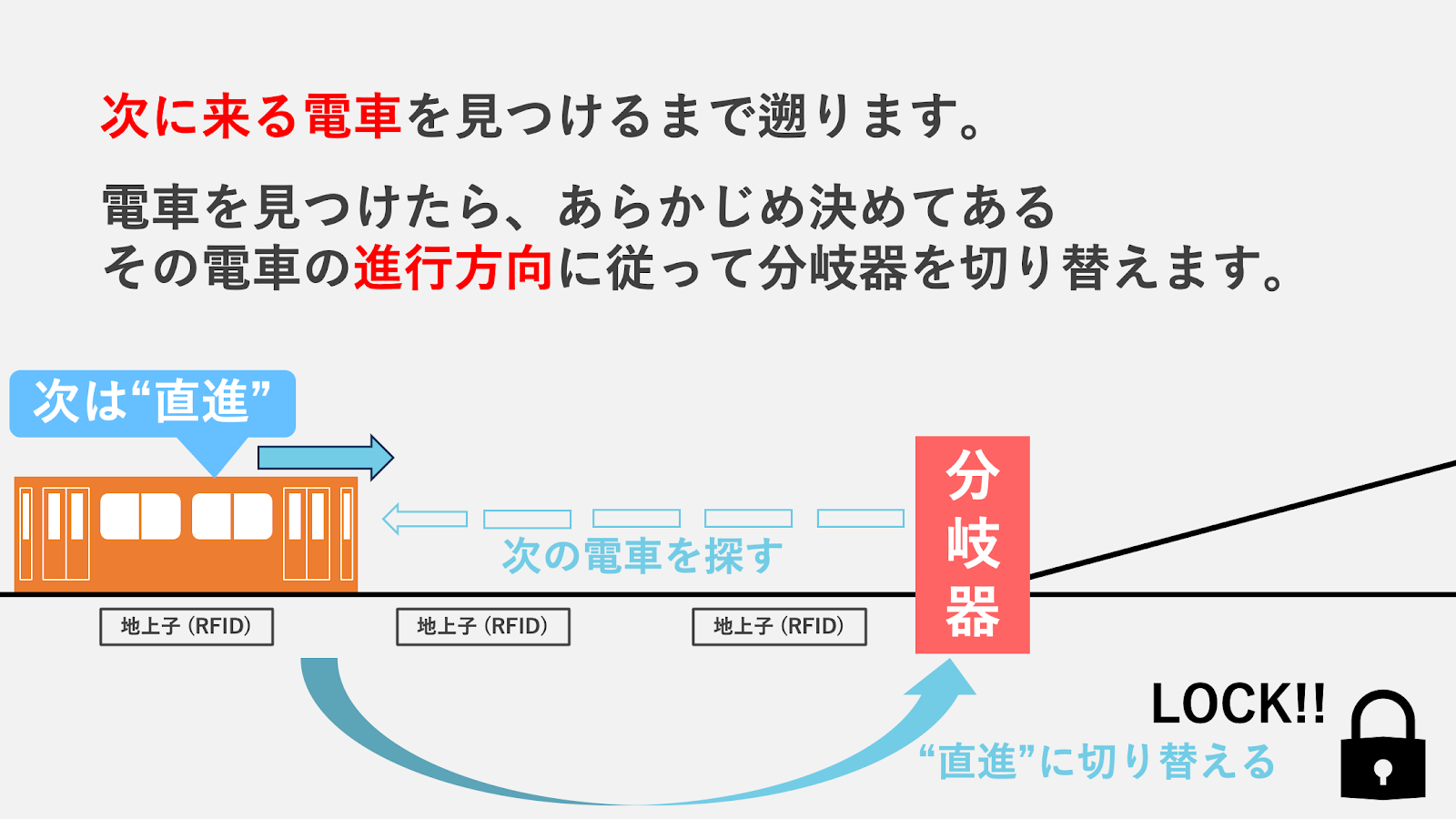
システム上では、各列車にあらかじめ「ルート」が設定されています。分岐器を切り替えるには、「次にどの列車がやってくるか」を事前に把握しなければなりません。
そこで、現在の列車の位置情報から閉塞区間を逆算し、分岐器に接近中の列車を特定します。
(位置検知の詳細は、「1. PTCSの速度制御」の記事をご覧ください)
安全を守る「鎖錠(ロック)」の仕組み
列車が安全に通過するために、「鎖錠(さじょう)」という鉄道制御の概念を取り入れています。
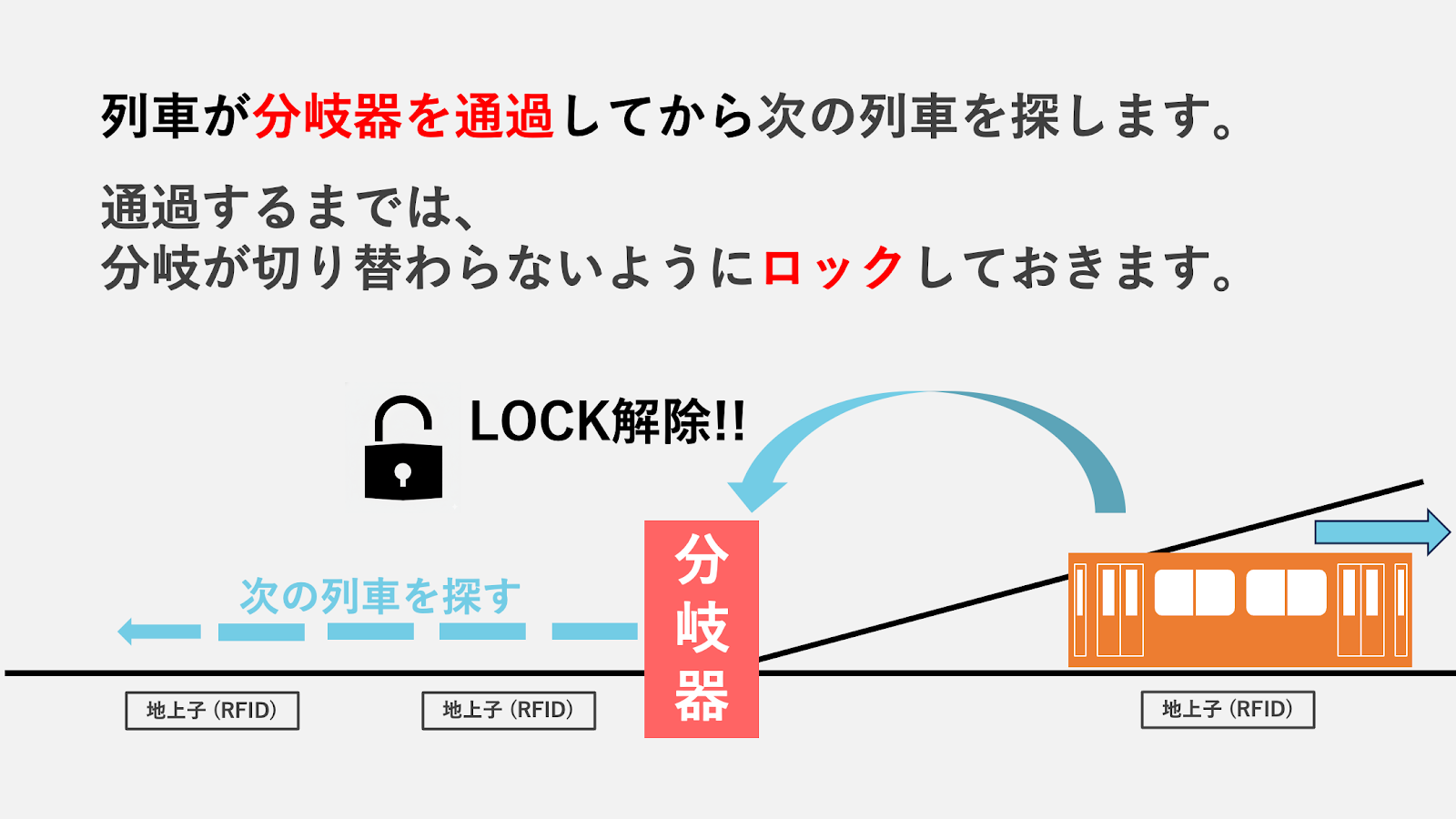
一度進路が決まったらその方向で固定し、列車が完全に通過するまで他の指示を受け付けないようにロックをかけます。
「接近検知 → 切り替え → 鎖錠 → 通過確認 → 解放」というサイクルを繰り返すことで、誤動作のない制御を実現しています。
3. 合流地点での衝突防止制御
合流側は物理的な駆動モーターは不要ですが、システム上は「仮想的な切り替え」を行っています。その目的は列車の衝突防止です。
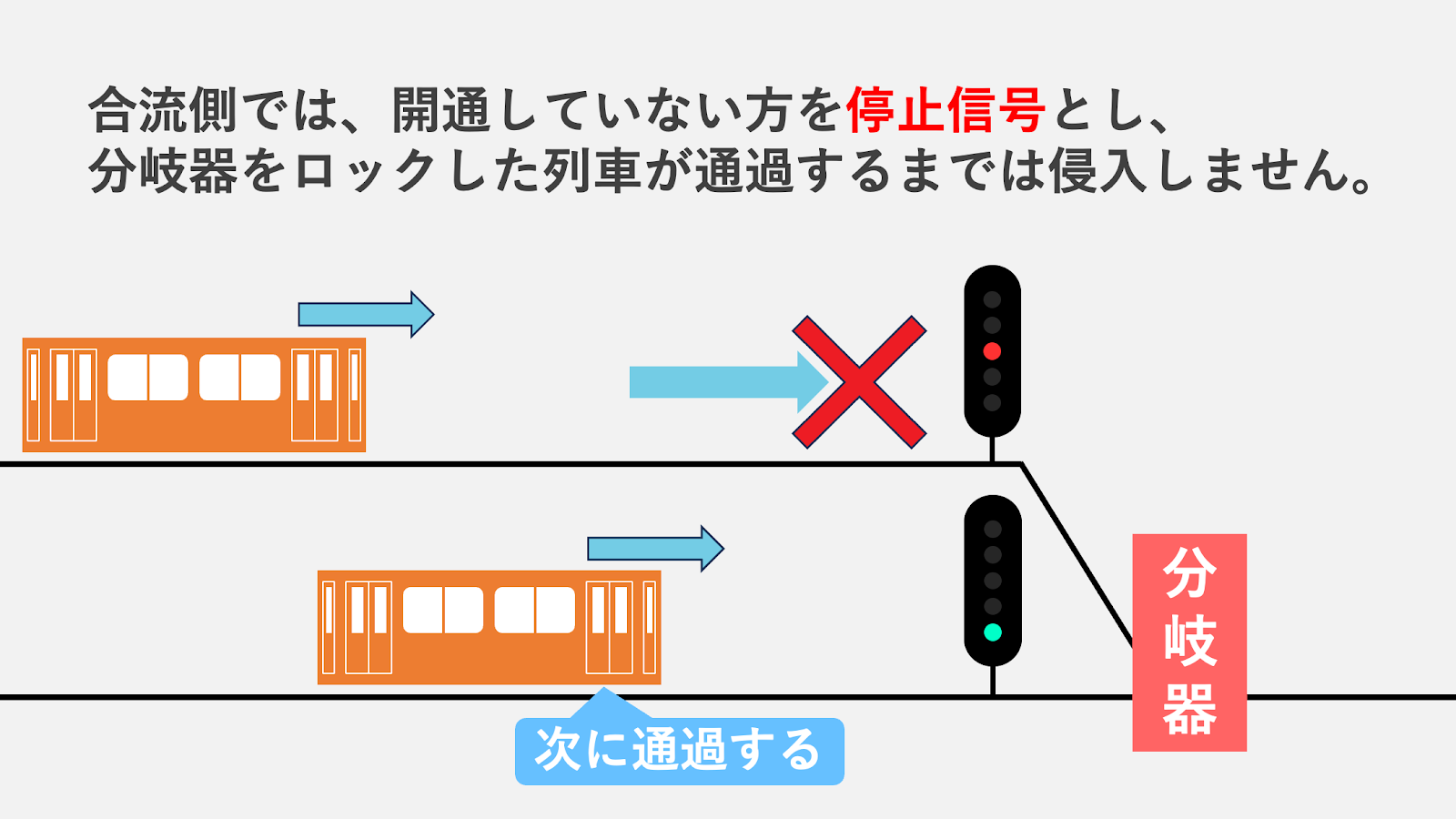
2方向から同時に列車が合流地点へ進入すると、衝突の危険があります。そのため、一方の進路を許可(ロック)している間は、もう一方の進路を「停止信号」として扱い、列車を待機させます。
これにより、複数の列車が行き交うレイアウトでも、安全な運行が可能になります。
実際の分岐器制御の様子は、前回の駒場祭での展示動画でもご覧いただけます。 ぜひこちらの動画も、分岐器に注目してご覧ください!!